MATE ROV
A remotely operated underwater vehicle (ROV) project to complete tasks in the MATE ROV Ranger class.
Project Overview
The MATE ROV was designed by the team that I led from 2023 - 2025 at New Trier High School. This ROV design was submitted for the MATE ROV Midwest Division Competition under the RANGER class.
Development Timeline
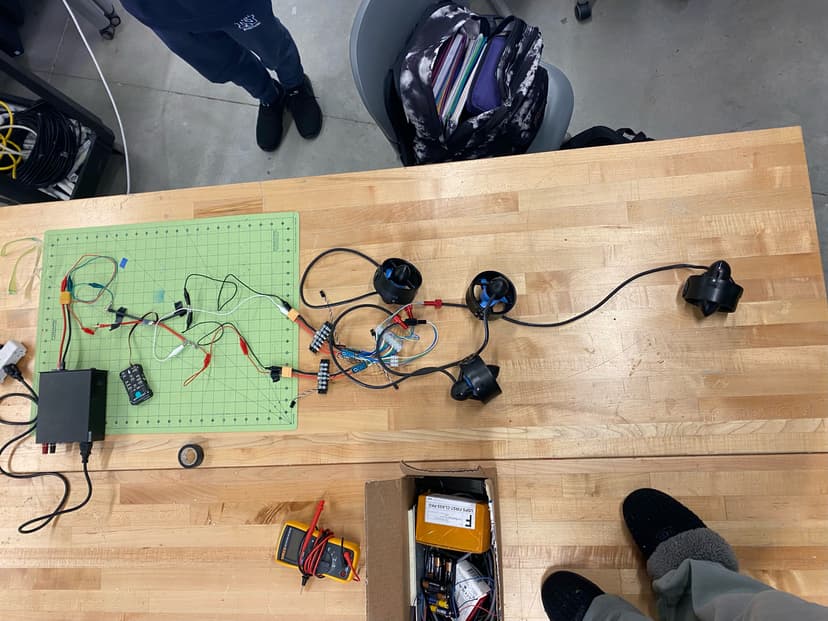
Phase 1: Electronics Development
The initial development of our ROV focused on establishing a robust electronic control system. This process began with the integration and wiring of the thrusters, followed by the design and testing of the control circuitry required to reliably power and maneuver the vehicle.
- Assembled electronic interface and navigator boards for thruster management
- Developed 14A power distribution systems for underwater operation
- Managed BlueOS operating system for ROV navigation and control


Phase 2: Frame Construction
With the electronics tested and ready, we moved to constructing the structural frame that would house all our components and provide the necessary buoyancy and stability.
- Designed modular frame structure using CAD
- Secured sensitive electronics in pressure vessel housing
- Implemented cable routing systems for clean organization
- CNC milled the final ABS production frame to ensure durability.


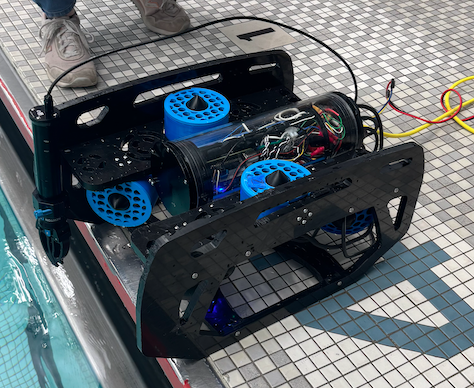
Phase 3: Thruster Integration
The next phase involved mounting the thrusters onto the ROV frame. While the wiring and waterproofing had already been addressed, their physical integration had not yet been completed. Using CAD, we designed custom thruster guards that were 3D printed and securely attached to the ABS frame.
- Tested individual thruster performance and control algorithms
- Implemented thruster protection and safety mechanisms

Phase 4: Camera System Installation
Finally, we added our 360-degree underwater camera system and mounting hardware to complete our ROV, enabling visual feedback and underwater exploration capabilities.
- Designed and 3D printed custom camera mounting system
- Integrated waterproof camera housing with LED lighting to support underwater exploration
